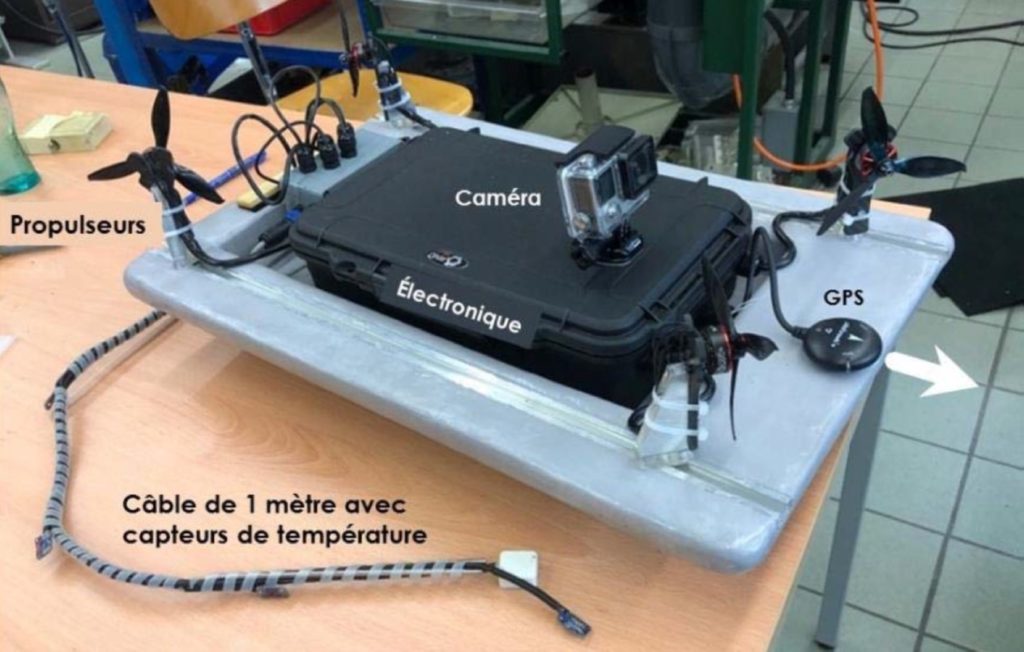
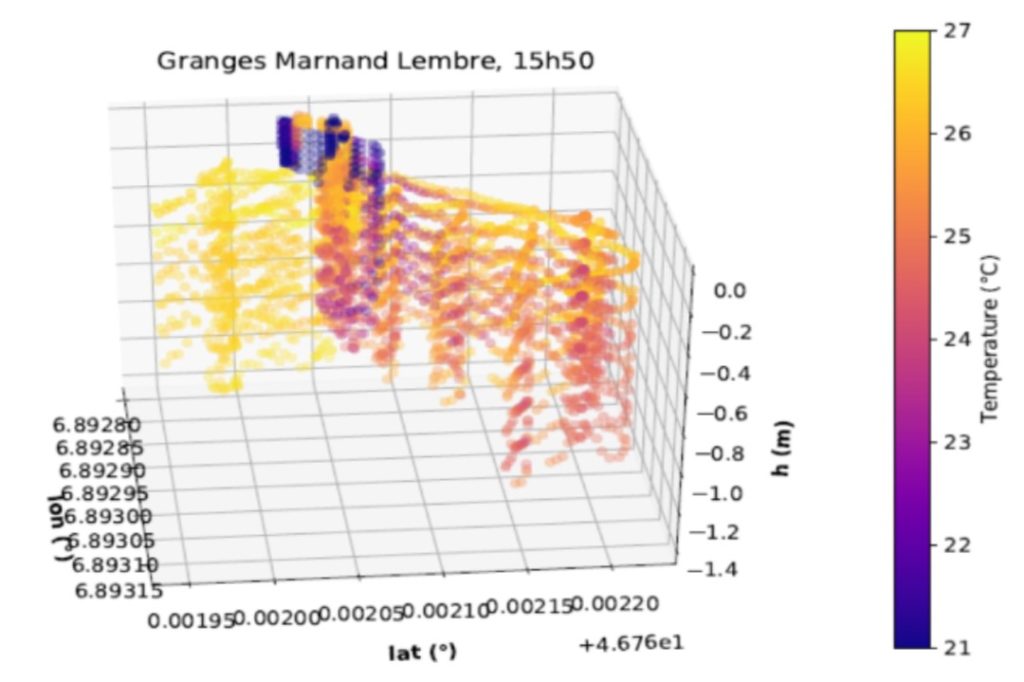
In the context of a project on behalf of the Environmental Directorate of the Canton de Vaud (CH), an autonomous floating vehicle (River Rover) was developed by our laboratory in order to perform a 3D temperature mapping of rivers (for the sake of fish survival studies).
The floating drone harbored a drag line instrumented with a series of temperature sensors (as well as pressure sensors used as depth probes). The River Rover mission was to provide a full 3D mapping of UNDERWATER temperature in a fully autonomous way, without perturbing the waters (and the fish). An airboat (external air propellers) configuration was chosen for this purpose.
This work was performed by Bachelor student, Fabien Fournet, and Research Assistant Thierry Bujard.